Each end effector keeps a low-dimensional control space without forcing all hands into one raw joint parameterization.
Overview Video
Cross-object and cross-end-effector grasp generation.
EAGG generates object-conditioned grasps for heterogeneous robotic hands and grippers by conditioning the generator on both object geometry and end-effector structure.
Core Idea
Align embodiment structure instead of suppressing it.
Different hands and grippers have different topology, joint spaces, closure behavior, and contact geometry. EAGG keeps those differences explicit and turns them into geometry-aware conditioning for a shared grasp generator.
The end-effector graph preserves kinematic organization, coupling, and morphology-specific structure.
A frozen backbone extracts geometry-aware tokens from the current articulated hand or gripper state.
Conditioning is refreshed during sampling so the generator remains synchronized with evolving grasp geometry.
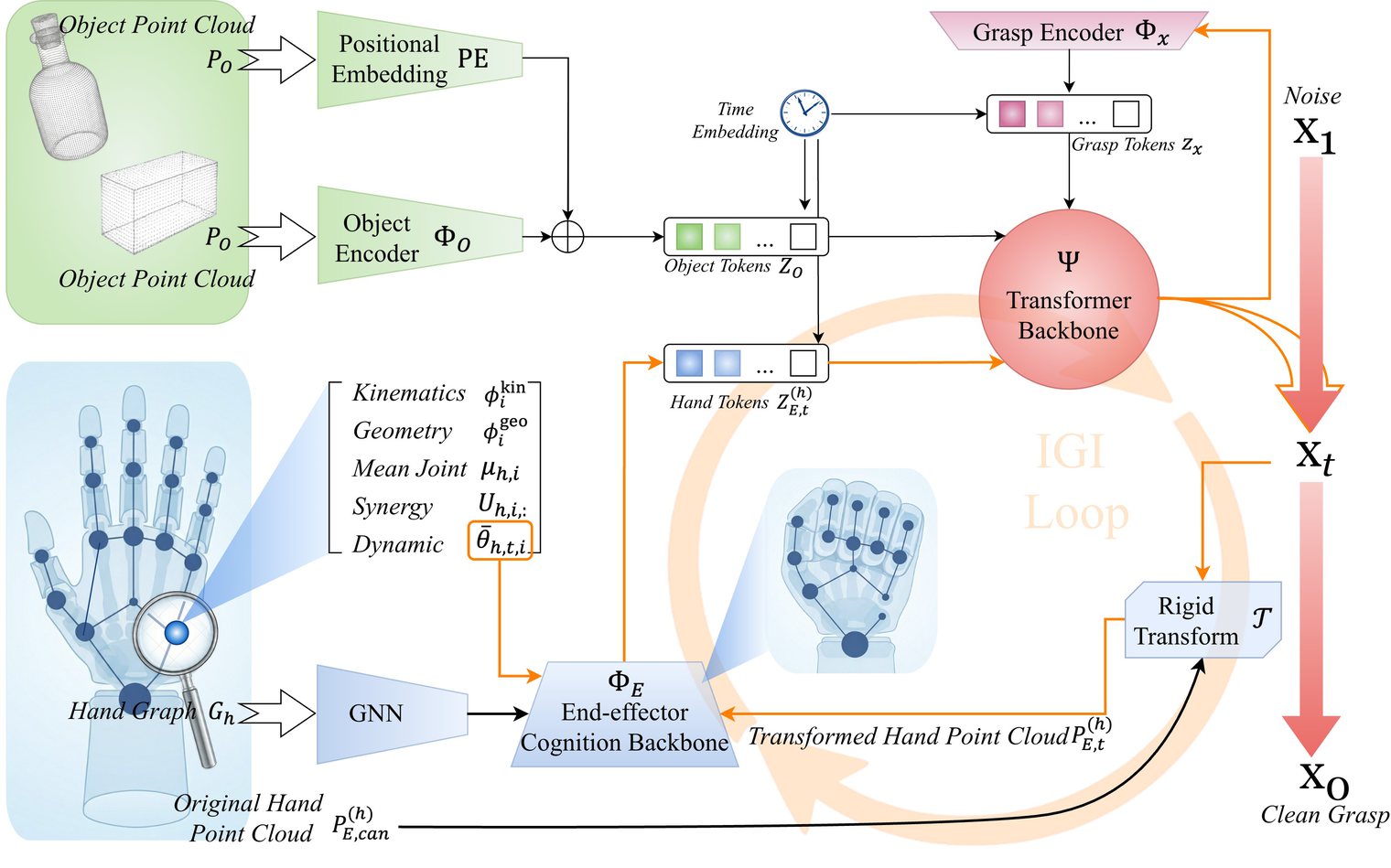
Method
Geometry-aware graph conditioning for heterogeneous end effectors.
EAGG combines object point tokens, grasp tokens, and end-effector tokens inside a transformer generator. The hand/gripper tokens are produced from topology-aware graph features and a canonical end-effector cloud, then updated through iterative geometry injection.
Resources
Paper, code, checkpoints, and dataset references.
Selected Results
Ranked visualizations and compact quantitative summaries.
Checkpoint inference is followed by ranked candidate selection and mesh rendering for bundled clean objects and released end effectors. The tables below summarize the paper's representative simulation, cross-regime, and hardware results.
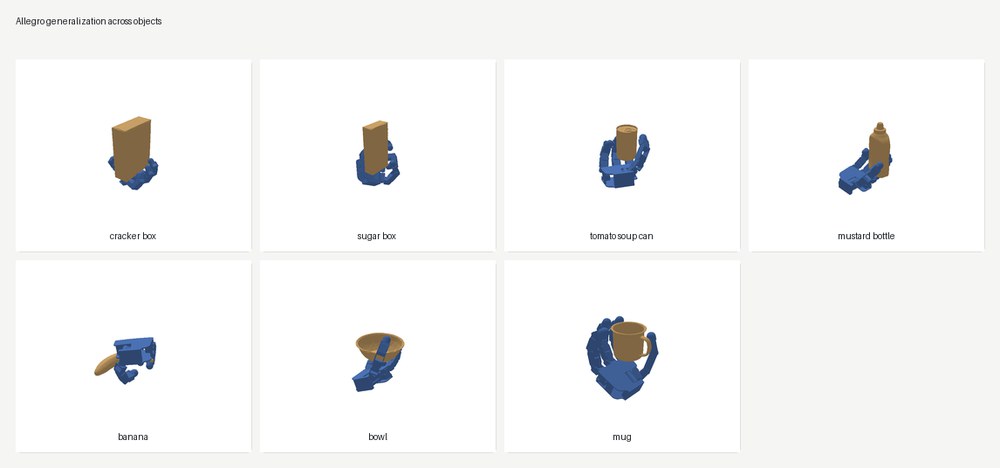
Cross-object generalization
Allegro is applied to multiple clean demo objects, with selected generated grasps rendered as object-hand meshes.
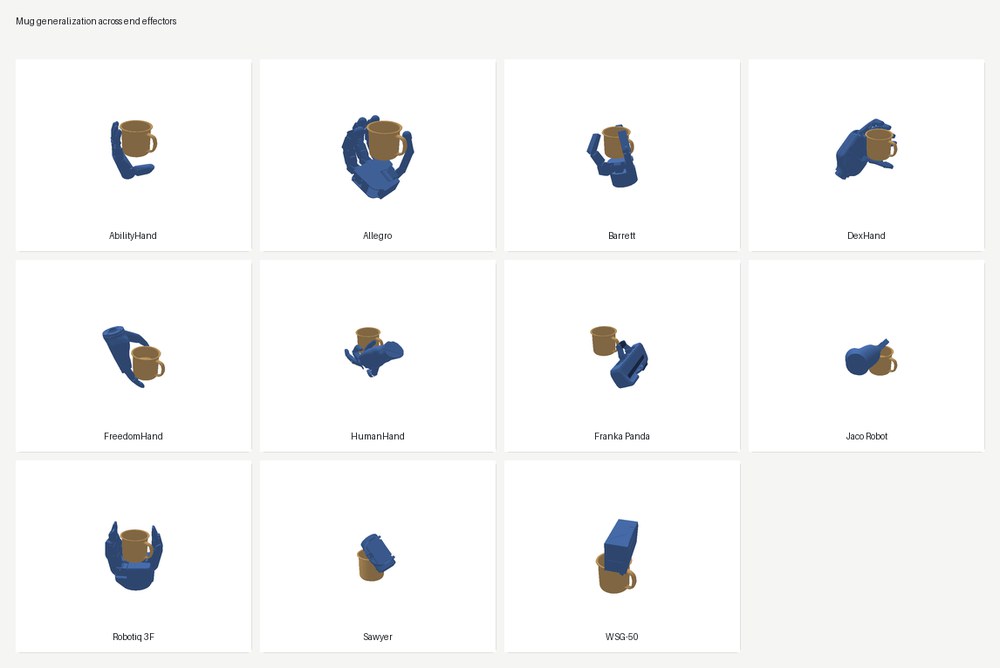
Cross-end-effector generalization
The mug object is fixed while the generated grasp is rendered for different hands and grippers.
Representative Simulation Comparison
| End Effector | Method | SR (%) | CD (cm) | PD (cm) | CC | RGR (%) |
|---|---|---|---|---|---|---|
| WSG-50 | EAGG Unified | 14.50 | 0.40 | 0.77 | 1.262 | 8.76 |
| WSG-50 | EAGG Specialized | 16.22 | 0.33 | 0.64 | 1.817 | 1.73 |
| Robotiq 3F | EAGG Unified | 78.42 | 1.14 | 1.48 | 2.512 | 1.20 |
| Robotiq 3F | EAGG Specialized | 79.26 | 0.78 | 1.07 | 2.615 | 0.18 |
| Allegro | EAGG Unified | 86.46 | 0.50 | 1.04 | 2.564 | 0.12 |
| Allegro | EAGG Specialized | 87.59 | 0.41 | 0.91 | 2.685 | 0.00 |
Cross-Regime Simulation Summary
| Regime | End Effectors | SR (%) | CD (cm) | PD (cm) | CC | RGR (%) |
|---|---|---|---|---|---|---|
| Training Unified | 6 avg. | 56.17 | 0.56 | 1.04 | 2.081 | 3.16 |
| Training Specialized | 6 avg. | 57.27 | 0.40 | 0.79 | 2.254 | 1.21 |
| Held-out Adapted | 2 avg. | 36.68 | 0.36 | 0.62 | 2.196 | 3.63 |
| Zero-shot Adapted | 2 avg. | 33.25 | 0.56 | 0.67 | 2.332 | 0.00 |
Real-World Hardware Evaluation
| Setup | Object Groups | Objects | Attempts | Average SR (%) |
|---|---|---|---|---|
| UR5 + FreedomHand | A-E | 57 | 62 | 91.94 |
| UR5 + DaHuan AG95 | A-E | 57 | 60 | 95.00 |
| SOARM101 | A-E | 57 | 64 | 89.06 |
SR denotes success rate, CD contact distance, PD penetration depth, CC contact count, and RGR repeated grasp rate.